
Contrôleur de vol NAZA-M
Page mise à jour le 16-03-2026 à 12:19
Configuration du PC et documentation
Windows 7 conseillé (driver incompatible avec Windows 10)
DJI Driver v2.02 (pour NAZA-M V2 et LITE)
Logiciel DJI NAZAM Assistant v2.40 (pour NAZA-M V2)
Logiciel DJI NAZAM Assistant v1.00 (pour NAZA-M LITE)
Notice du NAZA-M V2 (en anglais)
Notice du NAZA-M LITE (en français)
Se référer pour les bases à la Notice du NAZA-M LITE qui est plus claire et plus complète
DJI Driver v2.02 (pour NAZA-M V2 et LITE)
Logiciel DJI NAZAM Assistant v2.40 (pour NAZA-M V2)
Logiciel DJI NAZAM Assistant v1.00 (pour NAZA-M LITE)
Notice du NAZA-M V2 (en anglais)
Notice du NAZA-M LITE (en français)
Se référer pour les bases à la Notice du NAZA-M LITE qui est plus claire et plus complète
|
|
||||||||||||||||||||||||||||||||||||||||||||||
Prérequis
- Initialiser indépendamment chaque ESC
- Programmer chaque ESC à l'identique
- Déconnecter les BEC des ESC (ne conserver que la masse et le signal) si un module PMU ou VU est installé
- La valeur médiane de chaque ESC doit se situer à 1520 µs
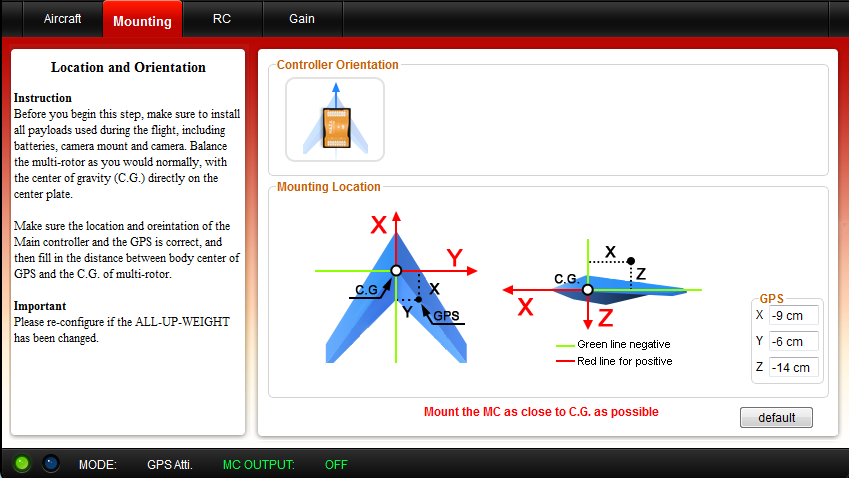
- Respecter l'orientation du MC et le positionner au centre de l'appareil
- Respecter l'orientation du GPS
- Eloigner au maximum le GPS/Compas de toute source magnétique
- Le PMU ou VU doit être correctement ventilé
- Le récepteur 2.4 GHz doit être correctement ventilé et ses antennes positionnées à 90°
Les réglages du NAZA-M V2
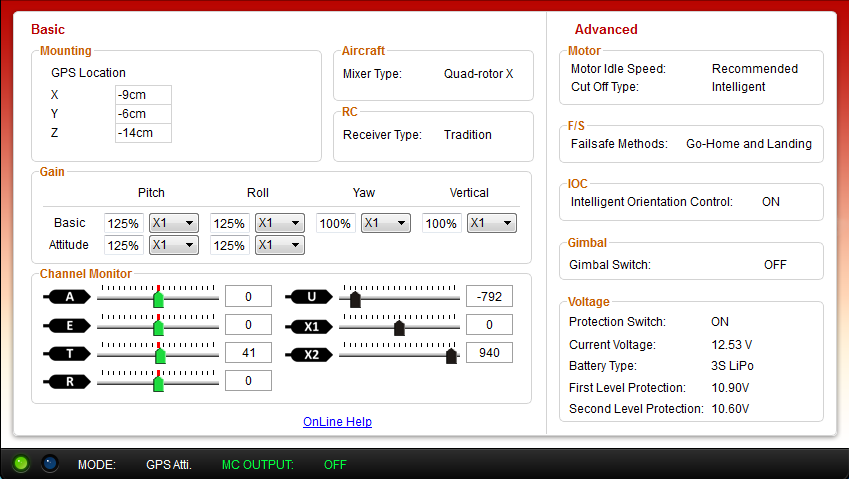
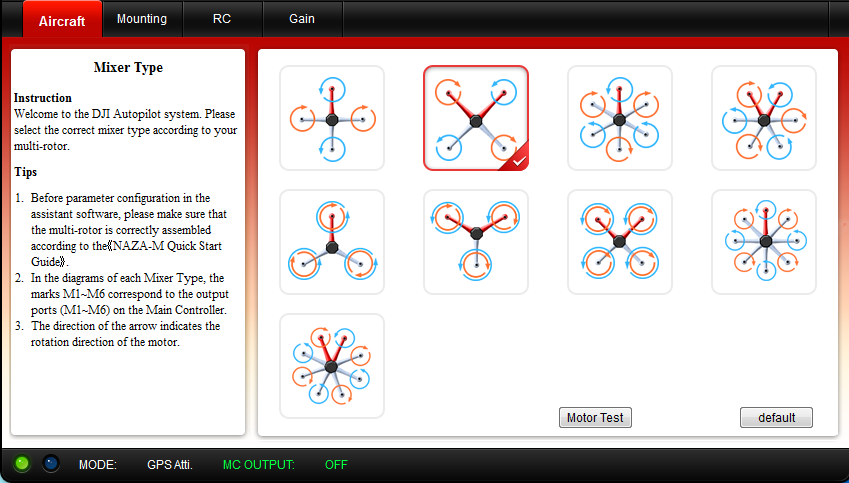
PAGE BASIC > AIRCRAFT
- Type d’appareil (F1 et F2 correspondent à M7 et M8 dans le cas des octocoptères)
- Test et sens de rotation individuel des moteurs
- Position de l’antenne GPS sur les trois axes par rapport au centre de gravité
Les valeurs saisies sont à valider avec la touche ENTREE
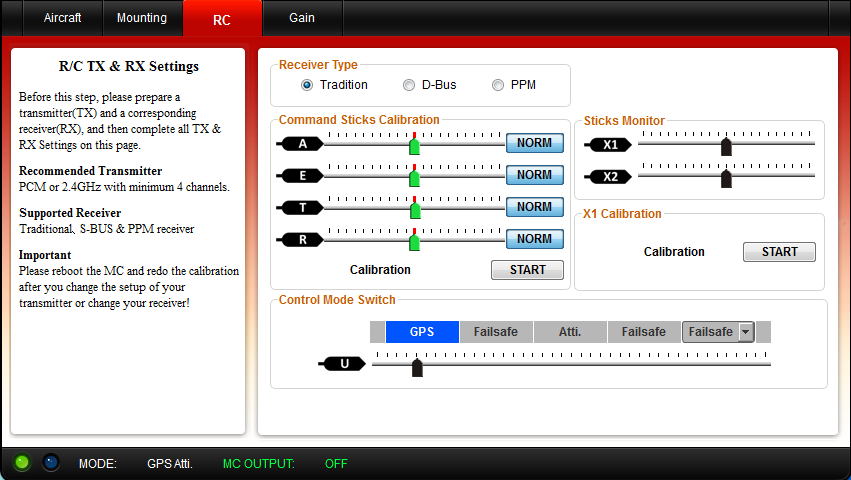
- Receiver type
- Mode Tradition pour radiocommande classique Futaba
- Respecter les connexions sur les ports 1, 2, 3, 4, U, X1 et X2
(utiliser uniquement le port X2 pour les systèmes Serial Bus) - Les inversions de sens peuvent rester sur NORM et se paramétrer sur l’émetteur
- Command Stick Calibration
- START
- Décrire des cercles avec les manches
- FINISH
- Sticks Monitor
- START
- Actionner le switch ou potentiomètre assigné au port X1
- FINISH
- Control Mode Switch
- Contrôlé par un switch 3 positions assigné au port U
- Régler sur l’émetteur les Endpoints et le Subtrim pour obtenir nettement les 3 positions :
- GPS
- ATTI
- FAILSAFE [ou ATTI ou MANUAL]
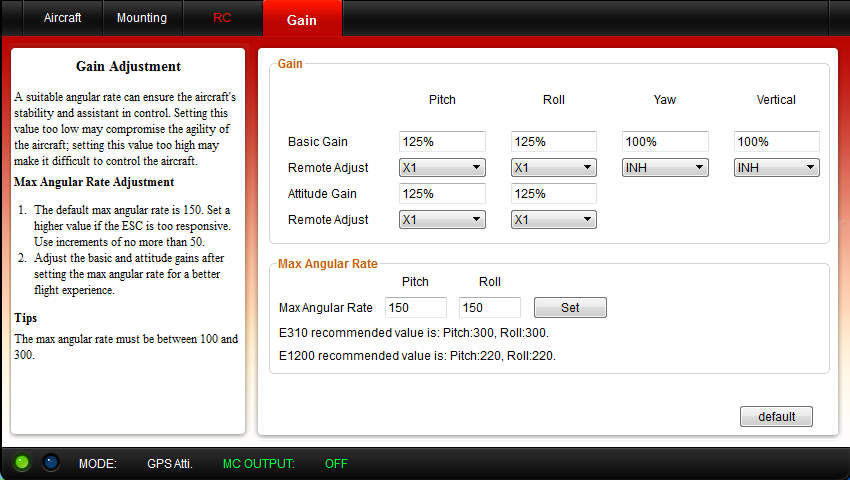
- Gains ajustables manuellement ou depuis les fonctions assignées au port X1 et/ou X2 (potentiomètres conseillés)
- Les gains doivent tout d'abord être réglés en mode MANUAL sur les trois axes et en ascensionnel
- Les gains doivent ensuite être ajustés en mode ATTI mais uniquement sur les axes Roll et Pitch
- Si l'appareil est trop vif ou oscille : diminuer le gain par pas de 10%
- Si l'appareil est trop mou ou instable : augmenter le gain par pas de 10%
- Ajustement de Max Angular Rate qui est la réactivité d'inclinaison en degrés par seconde des axes Roll et Pitch
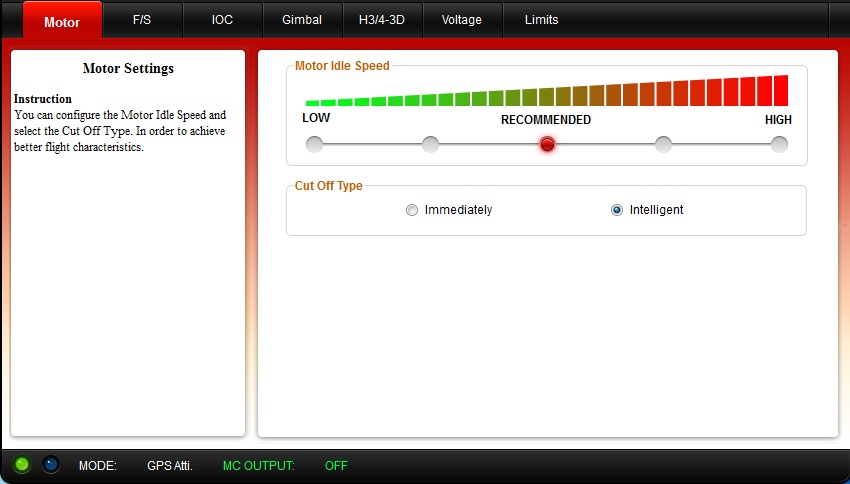
PAGE ADVANCED > MOTOR
La procédure LANDING remplace GO-HOME AND LANDING si le nombre de satellites acquis par le GPS est insuffisant
Procédure de réglage décrite plus bas
PAGE ADVANCED > IOC
- Motor Idle Speed : 5 niveaux de régime de ralenti (point milieu conseillé par défaut)
- Cut Off Type : Mode d'arrêt des moteurs, IMMEDIATELY ou INTELLIGENT (conseillé)
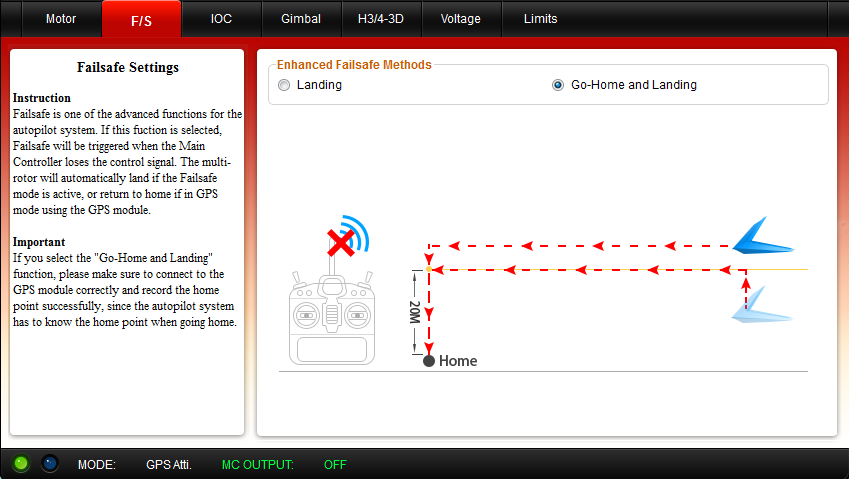
- Le FailSafe est éclenché par le switch U ou par une perte de signal radio
- L’appareil se place en stationnaire durant 3 secondes
- Au terme des 3 secondes il exécute la procédure programmée :
- LANDING
- L’appareil effectue 6 secondes de stationnaire
- L’appareil se pose à la verticale de sa position
- Les moteurs sont stoppés
- GO-HOME AND LANDING
- L’appareil conserve son altitude si supérieure ou égale à 20m ou prend de l’altitude si inférieure à 20m
- L’appareil se rend à la verticale de son point de décollage
- L’appareil effectue 15 secondes de stationnaire à 20m du sol (le contrôle radio peut être repris durant cette phase)
- L’appareil se pose
- Les moteurs sont stoppés
La procédure LANDING remplace GO-HOME AND LANDING si le nombre de satellites acquis par le GPS est insuffisant
Procédure de réglage décrite plus bas
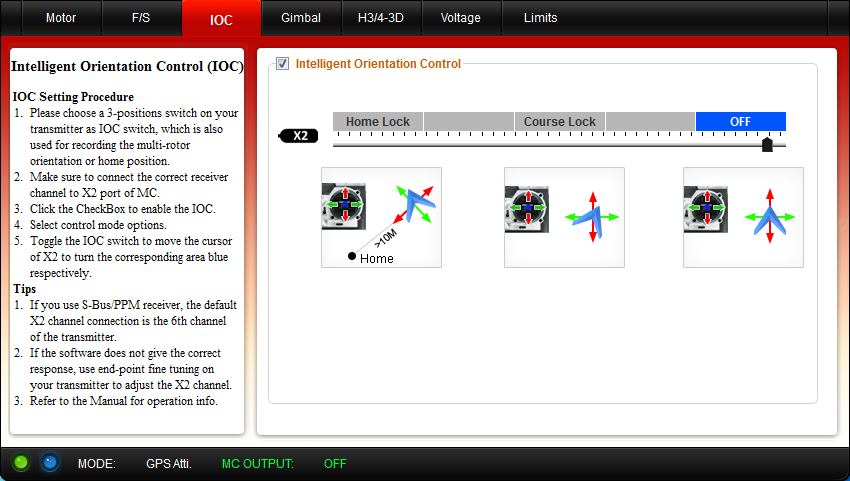
PAGE ADVANCED > IOC
- Activation de l'IOC (verrouillage de cap)
- Configuration d'un switch 3 positions assigné au port X2
- Valeurs HOME LOCK / COURSE LOCK / OFF
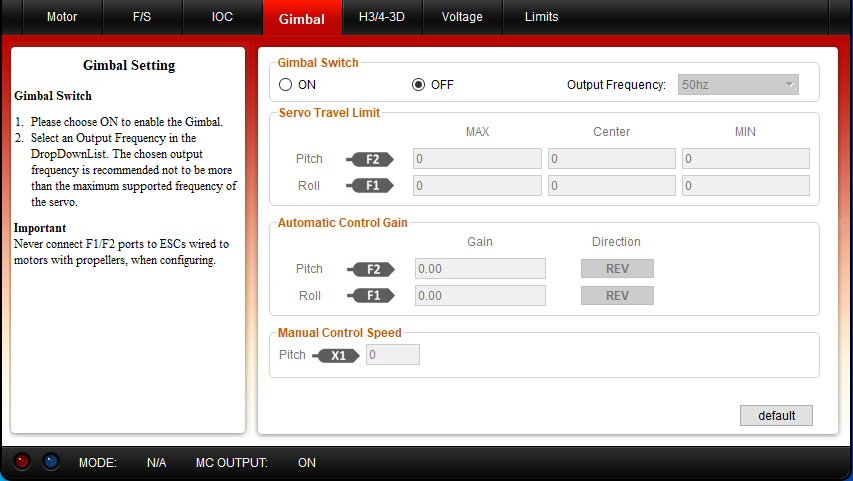
- Activation du contrôle de la nacelle
- Configuration des ports F1 et F2 dédiés à la nacelle
- Configuration d'un switch sur le port X1 pour l'ajustement de la vitesse de réaction de la nacelle
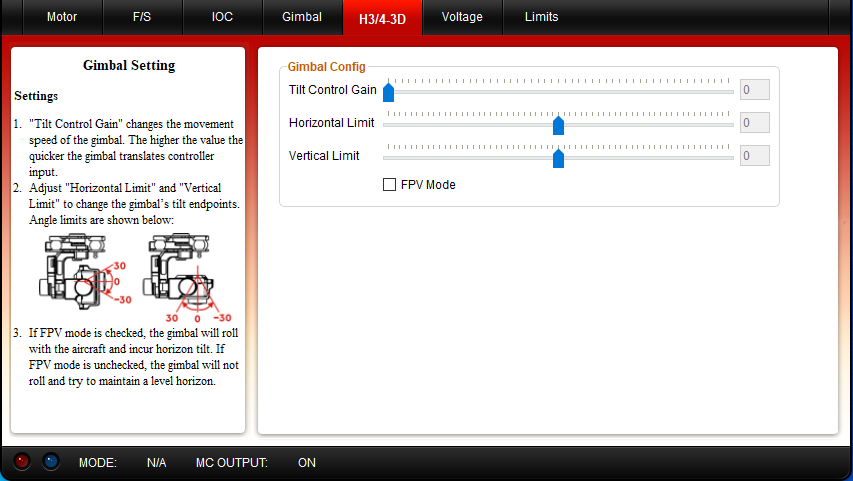
- Page spécifique aux nacelles Zenmuse DJI
- Réglage des gains et des limites
- Activation du mode FPV
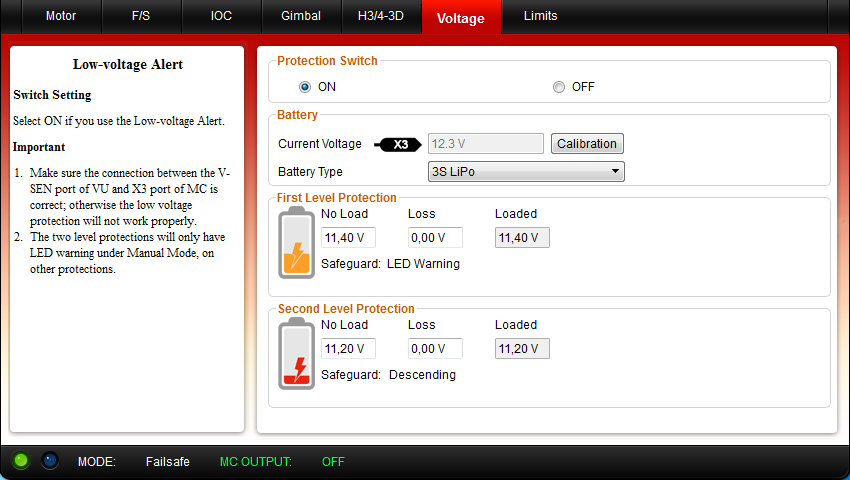
- Réglage des seuils d'alerte de tension basse (module PMU requis)
- Procédure de réglage décrite plus bas
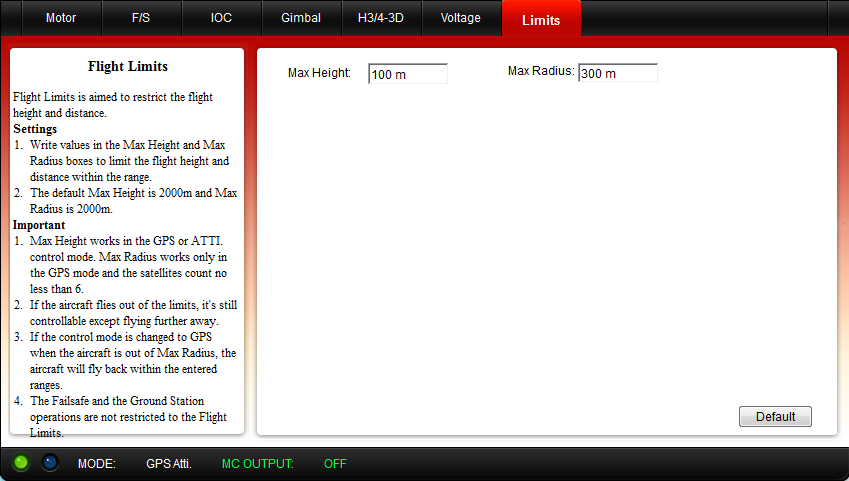
- Max Height : Altitude maximale, valeur raisonnable 100 m en vol à vue (2000 m par défaut)
- Max Radius : Rayon d'action, valeur raisonnable 300 m en vol à vue (2000 m par défaut)
PAGE TOOLS
- Exportation et Importation des paramètres (sauvegarde et restauration)
- Restore default settings (réinitialisation complète hormis la page Advanced/Voltage)
- Check et calibrage de l'IMU (à effectuer si l'appareil dérive ou tourne sur le plan horizontal)
- Calibrage avancé de l'IMU
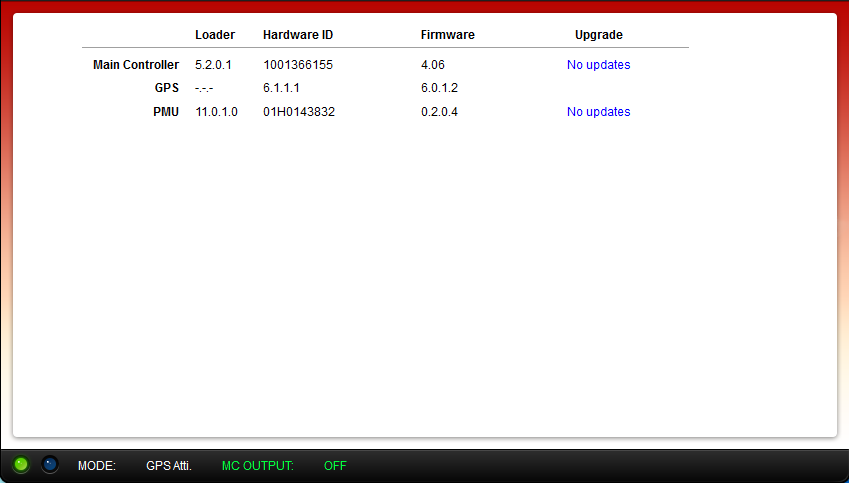
- Mise à jour des firmwares
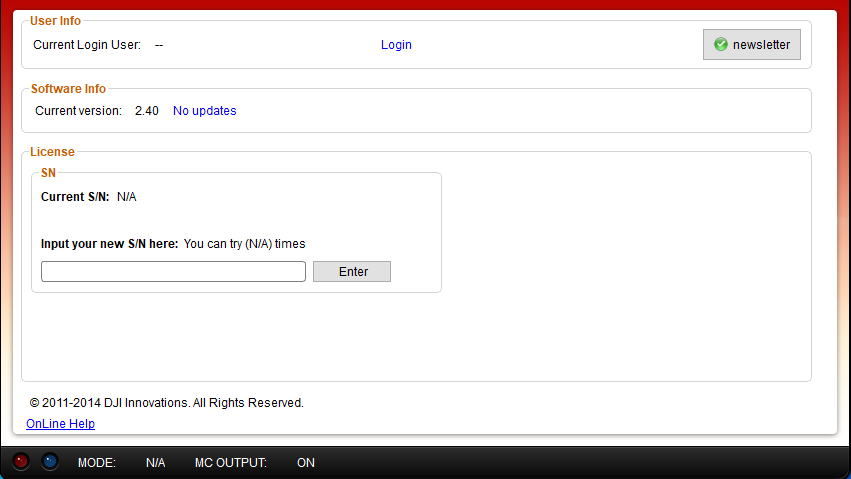
- Connexion au compte
- Mise à jour du logiciel
- Licence
Les limitations du NAZA-M Lite
PAGE BASIC > AIRCRAFT
- Type d’appareil limité à 6 moteurs
- Test individuel des moteurs non disponible
- Calibrage indisponible du port X1
- Max Angular Rate indisponible
- Page non disponible
- Page non disponible
- Calibrage avancé de l'IMU non disponible
Les procédures
CALIBRAGE DU COMPAS
COMPENSATION GPS
Attention : Il ne s'agit pas d'un dispositif intégré au contrôleur mais d'une procédure à exécuter en cas de perte du signal radio.
La fonction FailSafe doit donc être programmée sur la radiocommande pour que le système fonctionne.
- Actionner rapidement le switch U (5 fois pour le MC V2 ou 6 à 10 fois pour le MC Lite)
- La LED doit passer au JAUNE FIXE > Prêt pour le calibrage
- Effectuer 360° à plat autour de l'axe Z
- La LED doit passer au VERT FIXE > Prêt pour l’étape suivante
- Placer l’appareil le nez vers le bas et effectuer 360° autour de l'axe Z
- La LED doit s’éteindre > Le calibrage est réussi
COMPENSATION GPS
- Si l'appareil décrit un cercle sur le plan horizontal et dans le sens horaire : orienter le GPS de 10° à 30° vers la gauche
- Si l'appareil décrit un cercle sur le plan horizontal et dans le sens anti horaire : orienter le GPS de 10° à 30° vers la droite
- Si l'appareil dérive à droite en translation avant : orienter le GPS de 10° à 30° vers la gauche
- Si l'appareil dérive à gauche en translation avant : orienter le GPS de 10° à 30° vers la droite
- CSC (Combination Stick Commands) : Les deux manches tirés vers soi et dans des coins
- Mode IMMEDIATELY (déconseillé)
- Les moteurs s’arrêtent lorsque les gaz sont inférieurs à 10 %
- Les moteurs redémarrent si les gaz sont supérieurs à 10 % dans les 5 secondes qui suivent
- Les moteurs s’arrêtent si les gaz ne sont pas augmentés durant 3 secondes qui suivent l'exécution de la procédure CSC
- Mode INTELLIGENT
- En mode MANUAL, seule l'exécution de la procédure CSC peut arrêter les moteurs
- En mode GPS et ATTI l’arrêt des moteurs peut se faire dans 4 cas :
- Les gaz ne sont pas augmentés durant 3 secondes qui suivent l'exécution de la procédure CSC
- Exécution de la procédure CSC
- Gaz inférieurs à 10 % pendant plus de 3 secondes après atterrissage
- Angle d'inclinaison de l’appareil supérieur à 70° et gaz inférieurs à 10 %
- Durant un vol et dans tous les modes (GPS, ATTI et MANUAL) :
- Une valeur de gaz inférieure à 10 % n'arrêtera pas les moteurs mais déclenchera une procédure d’atterrissage
Attention : Il ne s'agit pas d'un dispositif intégré au contrôleur mais d'une procédure à exécuter en cas de perte du signal radio.
La fonction FailSafe doit donc être programmée sur la radiocommande pour que le système fonctionne.
- Procédure avec l'émetteur :
- Désactiver la fonction FailSafe sur le récepteur si celui-ci en possède une
- Activer la fonction FailSafe sur toutes les voies utilisées
- Programmer les positions manches centrés et switch U sur FailSafe
- Contrôler le fonctionnement du FailSafe depuis la page Basic > RC en simulant une perte du signal radio
- Procédure avec le récepteur (si celui-ci le permet) :
- Désactiver la fonction FailSafe sur toutes les voies de l'émetteur
- Centrer les manches et positionner switch U sur la position FailSafe
- Activer la fonction FailSafe en appuyant brièvement sur le bouton BIND du récepteur
- Contrôler le fonctionnement du FailSafe depuis la page Basic > RC en simulant une perte du signal radio
- Programmer le switch 3 positions assigné au port U en tant que GPS / ATTI / MANUAL
- Appliquer un dual rate sur cette voie avec un switch 2 positions
- Régler les valeurs du dual rate sur environ 50% pour obtenir les positions FAILSAFE intermédiaires
- Le FAILSAFE ne sera accessible que depuis les positions GPS et MANUAL
- Principe de fonctionnement :
- Le premier seuil d'alerte basse tension déclenche un clignotement rouge et permanent de la LED
- La valeur 90% des gaz bascule progressivement vers la position centrale du manche
(il devient alors de plus en plus difficile de prendre de l'altitude) - Le second seuil d'alerte basse tension déclenche une procédure d'atterrissage d'urgence
- Les moteurs sont stoppés après atterrissage
- Les moteurs peuvent ensuite être redémarrés mais le décollage est impossible
- Procédure commune :
- Alimenter l'appareil avec une batterie chargée à 100%
- Connecter le module PMU sur le port X3 (la page de réglages est grisée si le module PMU est absent)
- PROTECTION SWITCH sur ON
- BATTERY TYPE : sélectionner le nombre d'éléments en série
- CALIBRATION seulement si la tension affichée ne correspond pas à la tension mesurée avec un voltmètre
- Procédure simplifiée :
- FIRST et SECOND LEVEL PROTECTION :
- Renseigner les champs NO LOAD avec des valeurs adaptées au type de batterie *
- Laisser les champs LOSS à 0.00 V
- FIRST et SECOND LEVEL PROTECTION :
- Procédure complète :
- FIRST LEVEL PROTECTION :
- Renseigner le champ NO LOAD avec une valeur proche de la tension nominale la batterie
- Laisser le champ LOSS à 0.00 V
- Faire évoluer l'appareil jusqu'à l'apparition de l'alerte rouge sur la LED
- Poser l'appareil et reconnecter le MC au PC
- Reporter dans LOSS la différence entre la nouvelle tension affichée et la valeur NO LOAD
La valeur LOADED est automatiquement calculée
Le second champ LOSS prend la même valeur que le premier
- Renseigner le champ NO LOAD avec une valeur proche de la tension nominale la batterie
- SECOND LEVEL PROTECTION :
- Renseigner le second champ NO LOAD avec une valeur légèrement inférieure à la première valeur NO LOAD
- Faire évoluer l'appareil jusqu'au déclenchement de la procédure LANDING
- Reconnecter le MC au PC et corriger la valeur NO LOAD en fonction de la charge résiduelle
La seconde valeur LOADED est automatiquement calculée
- FIRST LEVEL PROTECTION :
- NO LOAD = Tension à vide de la batterie
- LOSS = Chute de tension en charge
- LOADED = Tension en charge de la batterie et seule valeur prise en compte durant le vol
- Les valeurs LOADED adaptées par cellule sont approximativement 3.60 V pour le niveau 1 et 3.50 V pour le niveau 2
- La batterie est à remplacer si la valeur LOSS dépasse 0.30 V par cellule (résistance interne trop élevée)
- Réaliser ses propres mesures en charge ou se référer aux tableaux suivants :
Les valeurs saisies sont à valider avec la touche ENTREE
Remarques :
| * Valeurs indicatives utilisables dans la procédure simplifiée | ||||||
| 1S | 2S | 3S | 4S | 5S | 6S | |
| FIRST LEVEL | 3.60 V | 7.20 V | 10.80 V | 14.40 V | 18.00 V | 21.60 V |
| SECOND LEVEL | 3.55 V | 7.10 V | 10.65 V | 14.20 V | 17.75 V | 21.30 V |
| Valeurs indicatives mesurables dans la procédure complète | ||||||
| 3S | 4S | |||||
| NO LOAD | LOSS | LOADED | NO LOAD | LOSS | LOADED | |
| FIRST LEVEL | 11.55 V | 0.69 V | 10.86 V | 15.40 V | 0.92 V | 14.48 V |
| SECOND LEVEL | 11.25 V | 0.69 V | 10.56 V | 15.00 V | 0.92 V | 14.08 V |
Les signaux LED
SEQUENCE DE DEMARRAGE
CALIBRAGE DU COMPAS
- Initialisation système
1. Démarrage du système et auto-vérification 1. Préchauffage après mise sous tension - Initialisation GPS
1. Signal GPS médiocre (satellites < 5) 2. Signal GPS moyen (satellites = 5) 3. Signal GPS correct (satellites = 6) 4. Signal GPS excellent (satellites > 6) 5. Enregistrement du Home Point 6. Prêt au décollage
| Manches non centrés en mode ATTI | ||
| Manches non centrés en mode GPS | ||
| Manches non centrés en mode IOC | ||
| Neutre des manches incorrect | ||
| Tension trop basse ou autre anomalie | ||
| Mode FailSafe / Perte du signal radio | ||
| Erreur GPS/Compas | ||
| USB connecté |
CALIBRAGE DU COMPAS
| Prêt pour le calibrage sur l'axe de lacet | ||
| Prêt pour le calibrage sur l'axe de roulis | ||
| Calibrage terminé | ||
| Echec de calibrage du compas |
Checklist des réglages
- BASIC > AIRCRAFT > Type d’appareil
- BASIC > AIRCRAFT > Test et sens de rotation des moteurs
- BASIC > MOUNTING > Position de l’antenne GPS
- BASIC > RC > Type de récepteur
- BASIC > RC > Calibrage et Sens des voies assignées aux manches
- BASIC > RC > Calibrage de la voie auxiliaire assignée à X1 (sur V2 uniquement)
- BASIC > RC > Fonction U sur GPS/Atti/Manual
- EMETTEUR > Sens des voies auxiliaires (U, X1 et X2)
- EMETTEUR > Endpoints et Subtrim de la fonction U
- EMETTEUR > Dual Rate sur fonction U pour FailSafe
- BASIC > GAIN > Réglage et assignation des voies (facultatif)
- EMETTEUR > Endpoints des voies utilisées pour les gains
- ADVANCED > MOTOR > Motor Idle Speed sur point central
- ADVANCED > MOTOR > Cut Off Type sur Intelligent
- ADVANCED > F/S > Méthode Go-Home and Landing
- EMETTEUR ou RECEPTEUR > Activation de la fonction FailSafe
- BASIC > RC > Contrôle par simulation d'une perte du signal radio
- ADVANCED > IOC > Switch assigné à X2 (facultatif)
- ADVANCED > VOLTAGE > Seuils d'alerte de tension basse
- ADVANCED > LIMITS > Altitude et rayon d'action maximum (sur V2 uniquement)
- TOOLS > Check et calibrage de l'IMU (si nécessaire)
- TOOLS > Calibrage avancé de l'IMU (si nécessaire et sur V2 uniquement)
- TOOLS > Sauvegarde des paramètres (Export)
- AUTRE > Calibrage du compas
Ecrans du NAZA-M Assistant 2.40

Caractéristiques des NAZA-M
| NAZA-M V2 | NAZA-M LITE | |
| Tension MC | 4.8V ~ 5.5V | 4.8V ~ 5.5V |
| Tension PMU/VU | 7.4V ~ 26.0V (2S ~ 6S) | 7.2V ~ 26.0V (2S ~ 6S) |
| BEC PMU/VU | 5V 3A | 5V 3A |
| Consommation électrique | 0.6W (5V/0.12A) ~ 1.5W (5V/0.30A) | 0.6W (5V/0.12A) ~ 1.5W (5V/0.30A) |
| Température de fonctionnement | -10°C ~ +50°C | -10°C ~ +50°C |
| Précision en vol stationnaire (mode GPS) |
Vertical : 0.8 m | Vertical : 0.8 m |
| Horizontal : 2.5 m | Horizontal : 2.5 m | |
| Vitesse angulaire maximum en lacet | 200°/s | 200°/s |
| Angle d’inclinaison maximum | 35° | 45° |
| Vitesse maximum montée | 6 m/s | 6 m/s |
| Vitesse maximum descente | 4.5 m/s | 6 m/s |
| Dimensions et poids MC | 45.5mm x 32.5mm x 18.5mm 27 g | 45.5mm x 31.5mm x 18.5mm 25 g |
| Dimensions et poids LED | 25mm x 25mm x 7.0mm 13 g | --- |
| Dimensions et poids GPS/Compas | 46 mm (diamètre) x 10 mm 27 g | 46 mm (diamètre) x 9 mm 22 g |
| Dimensions et poids PMU/VU | 39.5 mm x 27.5 mm x 10 mm 28 g | 32.2 mm x 21.1 mm x 7.7 mm 20 g |
| Poids total sans connectique | 95 g | 67 g |
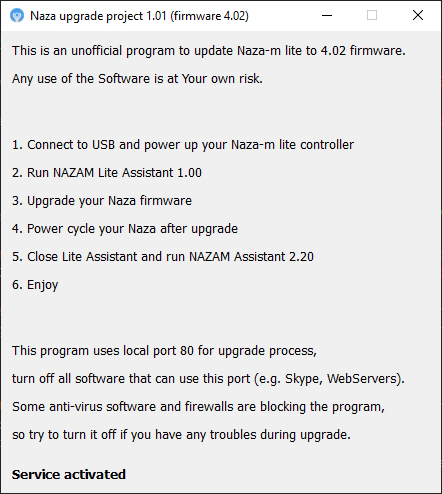
Firmwares
|
Upgrade du NAZA-M Lite en NAZA-M V2 |
|
Procédure :
|
|
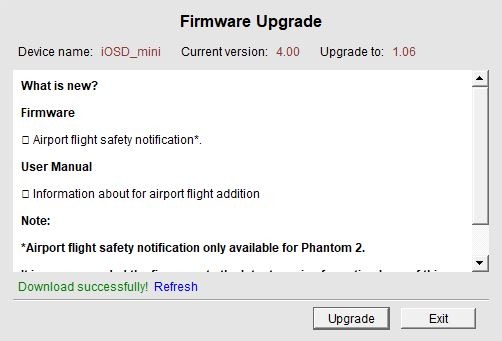
Downgrade du iOSD Mini |
|
Symptômes :
|
Téléchargements
Papy WinTux - Philippe DESLOGES - 2023-2026 - Powered by Debian - Apache 2.4.54 - PHP 7.4.33 - Last update 20-04-2026 19:05 - Page size 70 ko built in 2 ms
All trademarks, logos, images and documents on these pages belong exclusively to their respective owners.
All trademarks, logos, images and documents on these pages belong exclusively to their respective owners.