| Configuration du PC et documentation | ||||||||||||||||||||||||||||||||||||||||||||||||
|
Windows 7 conseillé (driver incompatible avec Windows 10)
DJI Driver v2.02 (pour NAZA-M V2 et LITE) Logiciel DJI NAZAM Assistant v2.40 (pour NAZA-M V2) Logiciel DJI NAZAM Assistant v1.00 (pour NAZA-M LITE) Notice du NAZA-M V2 (en anglais) Notice du NAZA-M LITE (en français) Se référer pour les bases à la Notice du NAZA-M LITE qui est plus claire et plus complète
Prérequis
|
||||||||||||||||||||||||||||||||||||||||||||||||
| Les réglages du NAZA-M V2 |
|
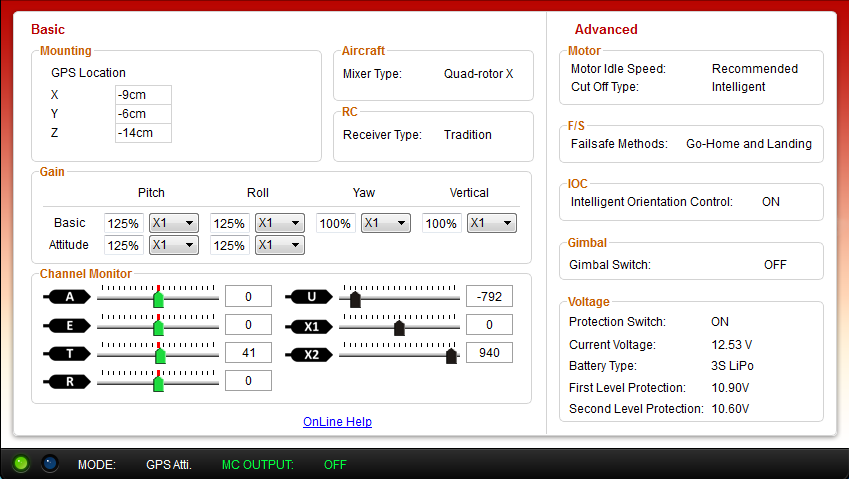
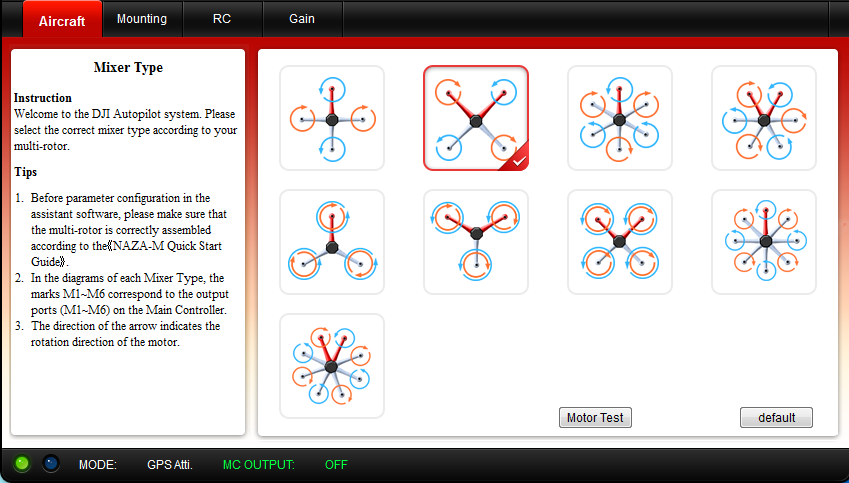
PAGE BASIC > AIRCRAFT
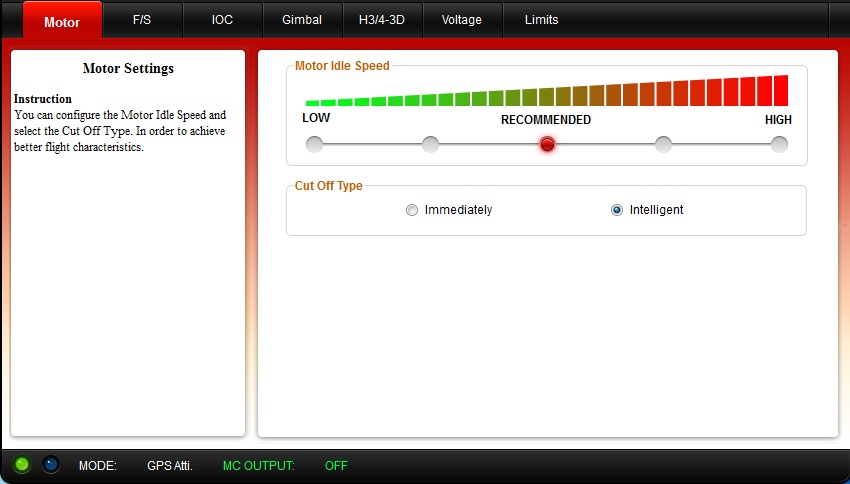
PAGE ADVANCED > MOTOR
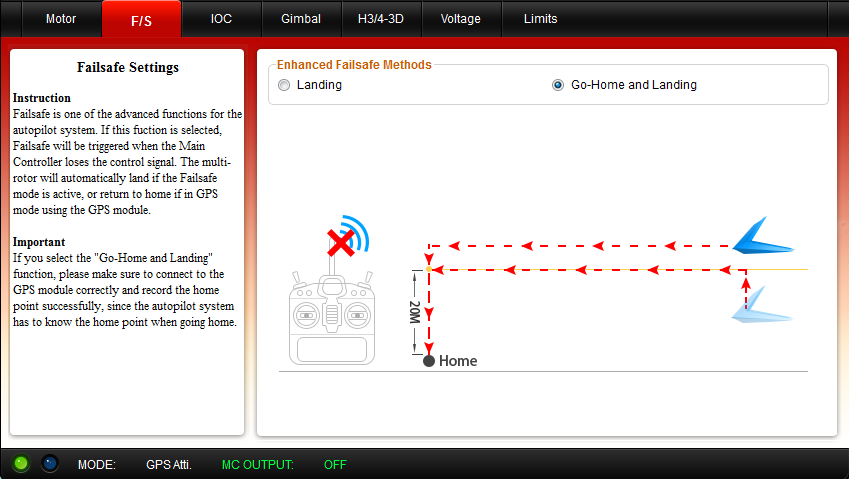
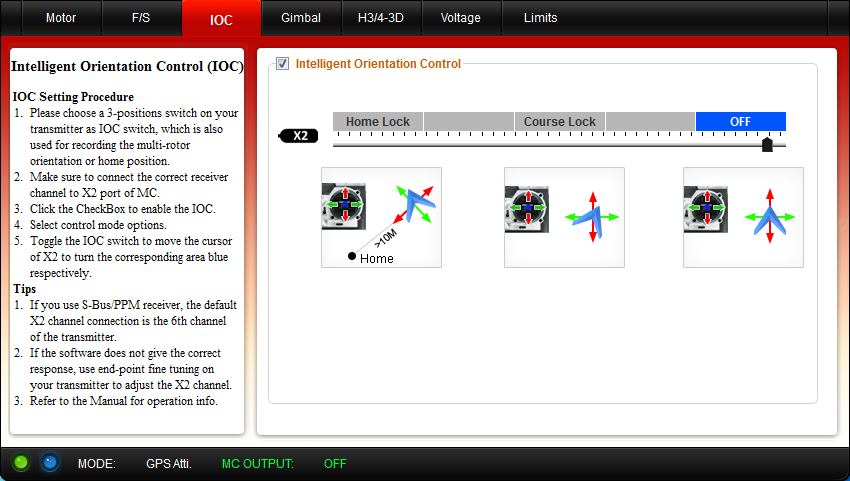
La procédure LANDING remplace GO-HOME AND LANDING si le nombre de satellites acquis par le GPS est insuffisant Procédure de réglage décrite plus bas PAGE ADVANCED > IOC
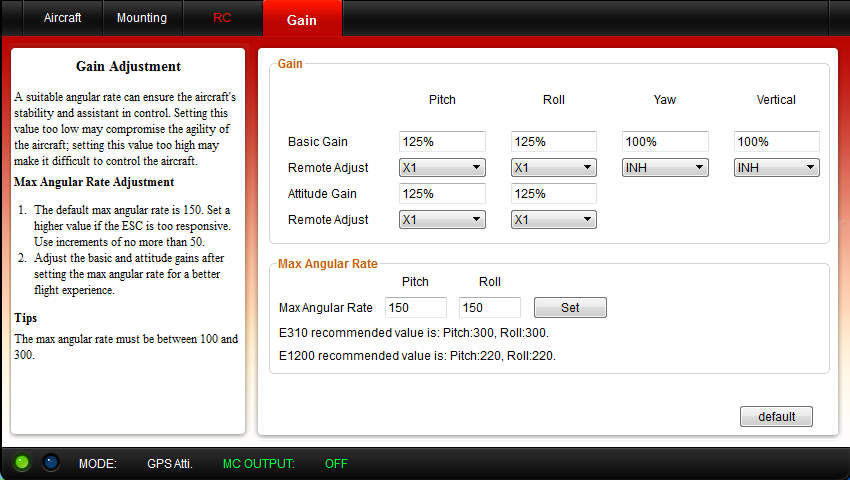
PAGE TOOLS
|
| Les limitations du NAZA-M Lite |
|
PAGE BASIC > AIRCRAFT
|
| Les procédures | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
CALIBRAGE DU COMPAS
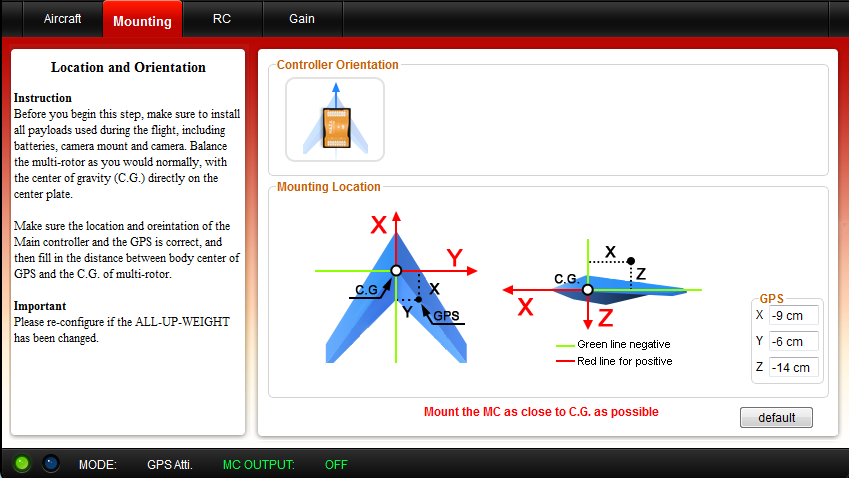
COMPENSATION GPS
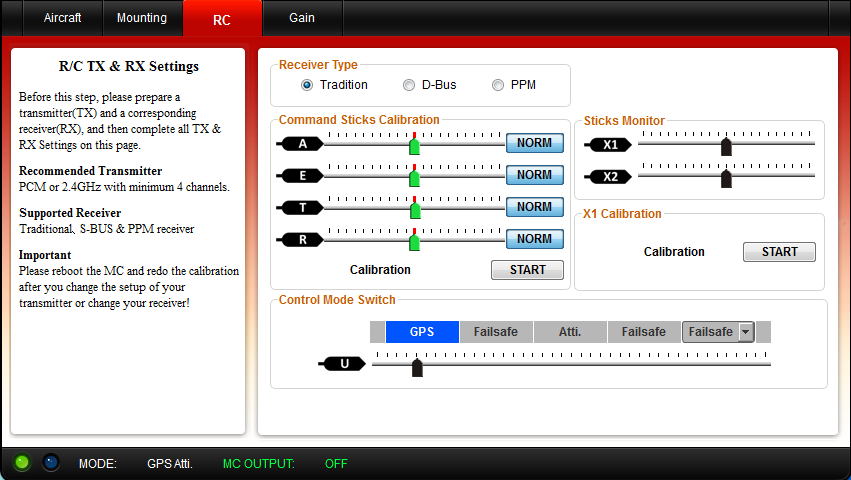
Attention : Il ne s'agit pas d'un dispositif intégré au contrôleur mais d'une procédure à exécuter en cas de perte du signal radio. La fonction FailSafe doit donc être programmée sur la radiocommande pour que le système fonctionne.
Les valeurs saisies sont à valider avec la touche ENTREE Remarques :
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Les signaux LED | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SEQUENCE DE DEMARRAGE
CALIBRAGE DU COMPAS
|
| Checklist des réglages | |
|
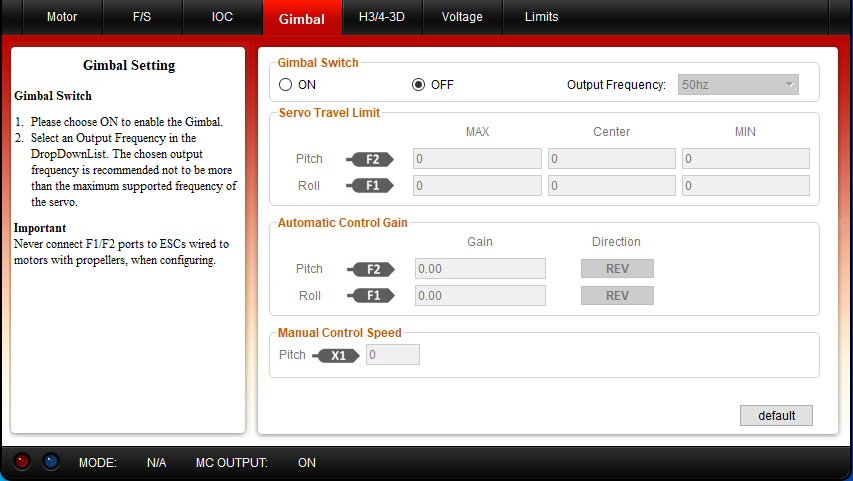
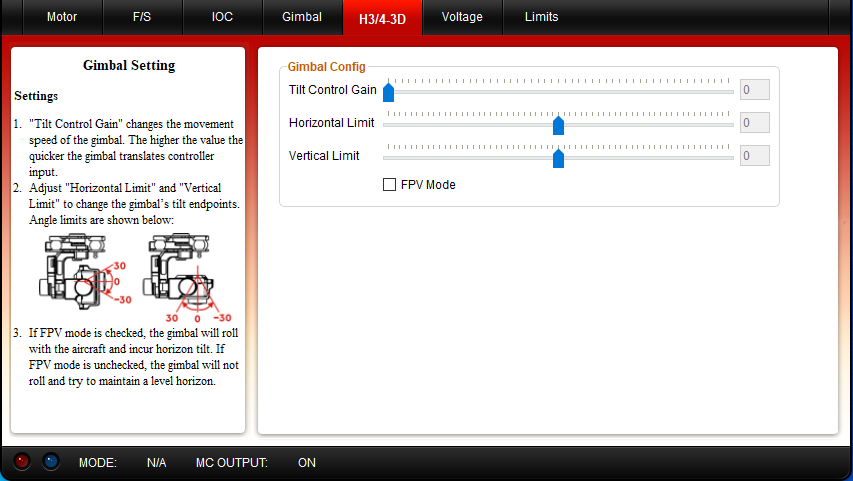
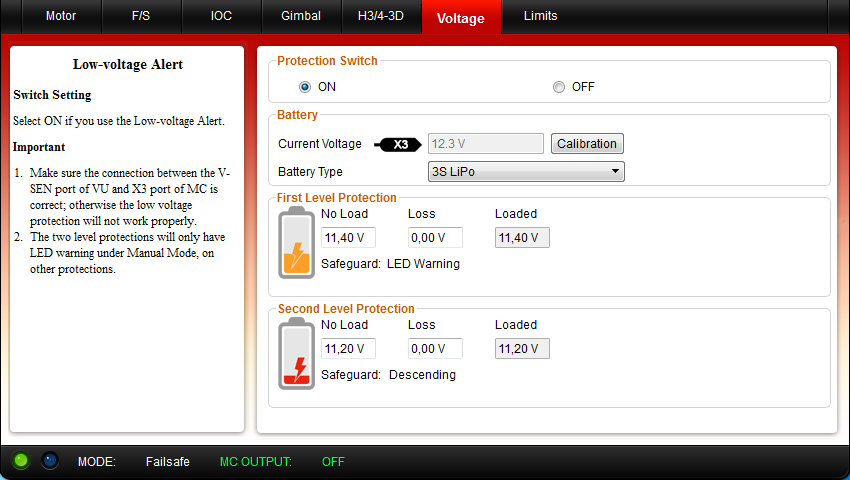
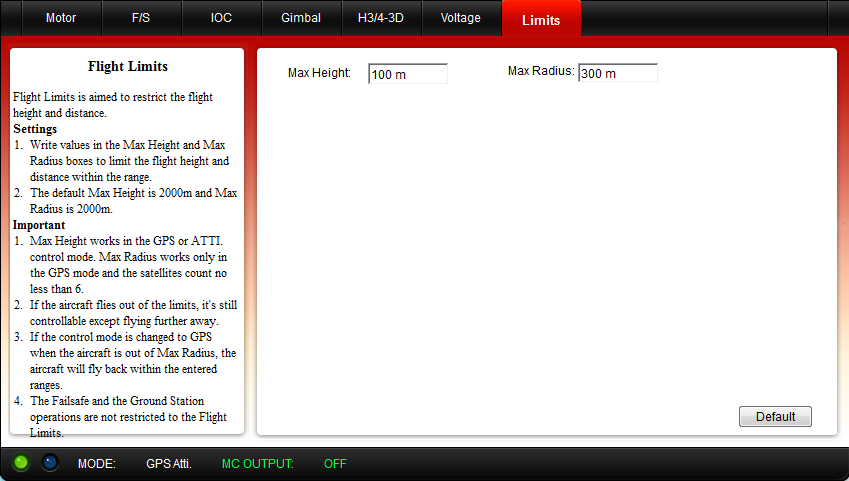
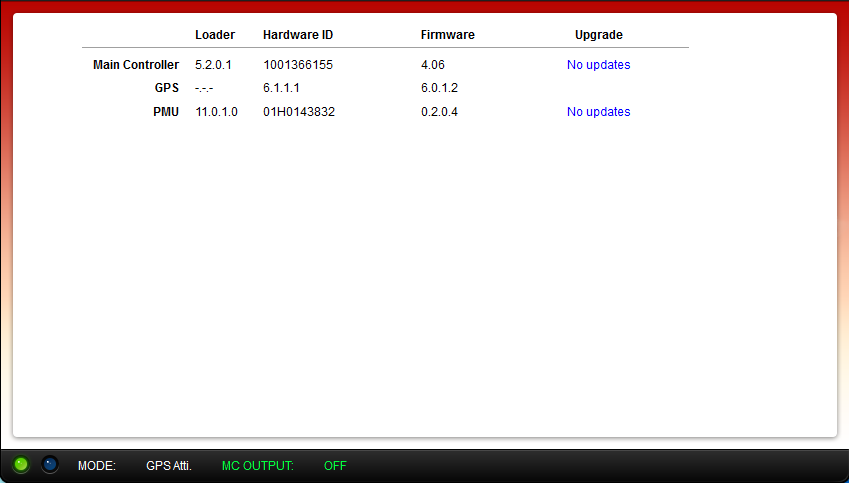
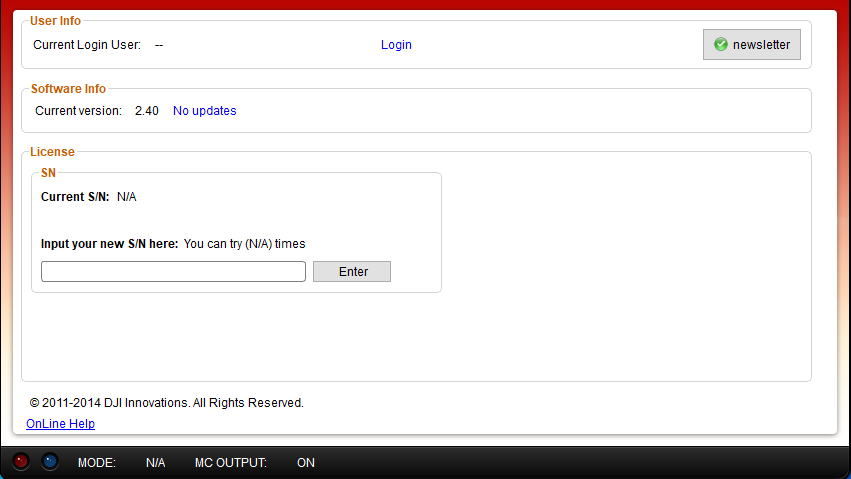
| Ecrans du NAZA-M Assistant 2.40 | |||||||||||||||
|
| Caractéristiques des NAZA-M | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
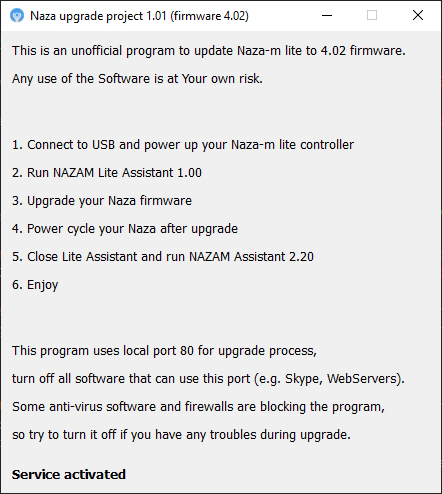
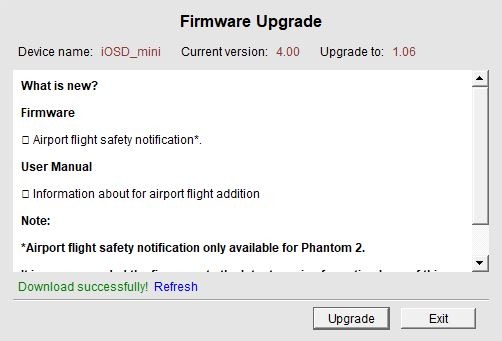
| Firmwares | |||
|
|||
|
| Téléchargements | |||||||||||||||
|